1
环境感知
摄像头与姿态信息同步采集,为导航与识别提供实时输入。
不把导航、识别、抓取拆成孤立演示,而是展示机器人在真实农业作业中需要完成的完整协同流程。
摄像头与姿态信息同步采集,为导航与识别提供实时输入。
视觉算法检测果实目标,并将图像信息转换为空间定位结果。
分层规划生成可执行路径,兼顾复杂地形通过性与计算效率。
底盘到达目标区域后完成姿态调整,进入机械臂工作范围。
MoveIt2 轨迹规划驱动机械臂完成接近、夹持与摘取动作。
作业结果回传到控制流程,形成可持续迭代的闭环任务链。
把底盘、感知、规划与机械臂执行放到同一条作业链中,展示整机协同能力。
局部高精度路径与全局低成本探索结合,支撑复杂三维环境中的实时规划。
首页前半部分直接呈现导航与抓取视频,让项目可信度更早建立。
依次展示自主导航介绍、自主导航实机演示和机械臂抓取演示。
介绍六驱机器人自主导航系统的整体思路、感知输入与路径规划流程。
展示机器人在农业场景中的路径跟踪、障碍规避与末端停靠能力。
展示机械臂接近目标、末端调整与抓取执行的完整作业过程。
通过对比常规做法与本项目方案,突出六驱平台、视觉定位、分层规划和机械臂协同的综合价值。
底盘、感知、规划、机械臂和控制链路都在同一个作业任务中出现。
围绕果园、田间非结构化地形设计,不只是通用移动机器人演示。
视频、系统图、算法图和文档入口共同呈现项目成果。
针对果园、田间地面起伏、草地泥地并存等情况,采用六轮底盘结构提升接地能力与通过性能,增强机器人在农业非结构化环境中的行驶稳定性,为后续识别与摘取提供可靠平台。
结合视觉识别技术对目标果实进行检测,并利用空间位置信息完成目标定位,将图像中的果实信息转换为机械臂可调用的坐标数据,提高摘取过程中的定位准确性与作业可行性。
通过环境感知与路径规划实现农业场景中的自主巡行、路径跟踪和障碍规避,并在接近目标后根据机械臂工作范围完成末端对位,使机器人不仅能到达目标区域,还能停在合适作业位置。
根据果实位置进行机械臂运动规划与末端调整,完成接近、夹持和简单摘取动作,减少因目标偏差、姿态不合适或底盘位置不佳带来的摘取失败问题。
构建“自主巡行—果实识别—精准停靠—机械臂摘取”的闭环任务流程,使导航系统、视觉模块与机械臂控制相互衔接,提升整机在农业场景中的连续作业能力。
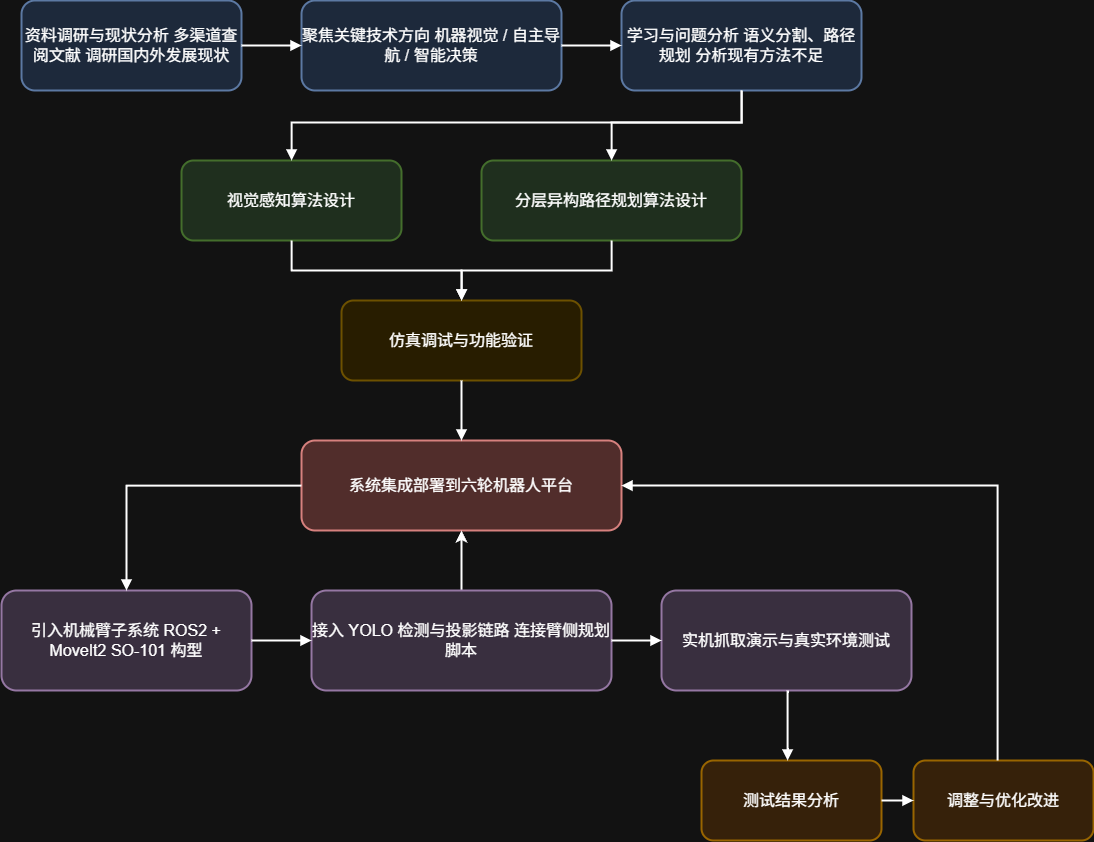
项目围绕果园、温室和田间等非结构化场景展开,先分析复杂地形通行、光照遮挡、目标定位和机械臂可达性等问题,再将 RGB-D 感知、分层路径规划和机械臂协同控制集成到实机平台。集成阶段引入基于 ROS2 与 MoveIt2 的机械臂子系统,将 YOLO 检测、深度投影和坐标变换链路接到臂侧规划脚本,使感知与规划结果能够落到抓取演示。
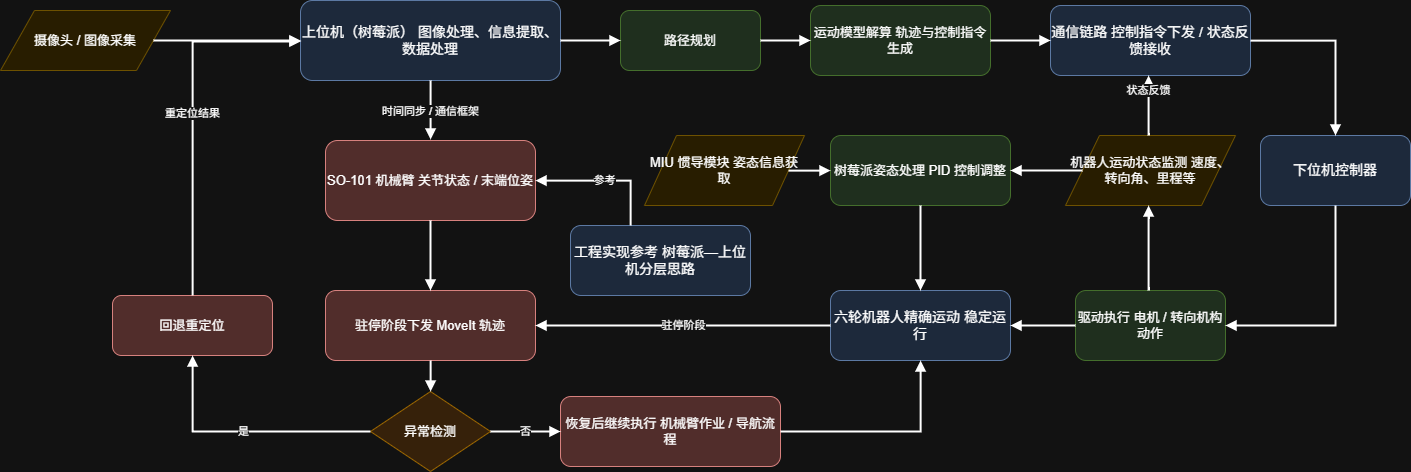
系统采用上位机与下位机分层控制结构。上位机负责 RGB-D 图像处理、果实识别、深度定位、路径规划和任务调度;下位机负责电机驱动、编码器与 IMU 状态采集、PID 闭环控制和底盘安全保护。机械臂关节与末端位姿纳入同一任务链路,便于在底盘驻停后下发 MoveIt 轨迹,并在识别失败、目标不可达或深度异常时回退重定位。
本方案提出一种结合双分支融合网络(SFNet)与自监督学习的RGB-D视觉感知算法。SFNet利用RGB和深度图提取语义与几何特征,并通过特征互补模块实现多尺度融合。自监督模块以超像素为参考引导网络学习,同时基于深度图构建斜率、台阶高度和粗糙度的可通行性图,与分割图融合生成最终通行区域,提升复杂环境下的语义理解与路径规划能力。
自监督视觉预训练方法无需标签数据,而是依赖前置任务而非基于人类标注标签的预测。然而,由于标签有限,从自监督可通行性数据中提取高度判别性特征颇具挑战性。如果在自监督可通行性数据提供的最小监督之外,结合视觉特征的自监督学习......
本方案包含一个用于分割的双分支融合网络(SFNet)和一个自监督学习模块。RGB-D图像作为分割融合网络(SFNet)的输入。在架构的编码器部分,我们创建了两个独立的分支:RGB分支作为主分支,深度分支作为从分支,以独立提取RGB和深度特征的信息......
该方法在四个阶段聚合了多尺度特征。首先,将彩色图像输入到RGB分支中,我们采用基于全卷积网络[12]的网络架构。解码器利用共享的池化掩码和跳跃连接来学习局部图像特征,而解码器遵循对称结构来重构图像信息......
基于六轮无人机器人的复杂3D场景,以及能够在信号薄弱地区实现高效自主路径规划的需求,本项目提出一种复杂三维环境自主探索的分层框架方法。 本项目将传统路径规划分为局部规划层以及全局规划层。在局部规划层维护高分辨率环境表示并生成动力学可行路径,全局规划层维护低分辨率表示并计算粗路径。通过随机采样选视点、构建路径并平滑、全局规划连接子空间等步骤,优化整体探索路径。相关实验表明使用该分层框架,其探索效率提升80%,计算量减少50%以上。
在机器人探索环境时,即使机器人处于同一位置,不同的传感器朝向也会形成不同的视点,获取不同的环境信息。 表面点用于界定自由空间和非自由空间(包括被占据空间和未知空间)的广义边界。表面点是传感器感知的关键对象。机器人通过传感器采集数据,确定表面点是否被覆盖,以此判断自身对环境的感知程度。 视点决定了表面点能否被感知。机器人通过传感器获取环境信息,而视点定义了传感器的位姿。 ......
根据采样视点生成路径,考虑曲率约束,将路径计算问题转化为NP难问题,采用近似算法分两步求解,先确定视点顺序,再分离视点成段并平滑,使用贪心策略降低计算复杂度。 局部路径规划目标是在给定一组采样视点的情况下,生成一条能遍历这些视点且满足机器人运动学和动力学约束的连续路径,使机器人可以高速运动 ......
将局部规划视野H之外的空间划分为均匀的长方体子空间。这些子空间用于存储在探索过程中发现的覆盖和未覆盖表面信息。 每个子空间都有三种状态:“未探索”(不包含任何覆盖或未覆盖表面)、“探索中”(包含未覆盖表面)和“已探索”(仅包含覆盖表面)。在全局规划时,只关注处于“探索中”状态的子空间 ......